Ever wished your camera could perfectly frame a rectangle spline without manual tweaking? This Python Tag does exactly that—automatically positioning your camera at the ideal distance to match your render resolution and focal length. No guesswork, just clean framing.
🎯 What It Does
This script aligns your camera to a Rectangle Spline and calculates the exact distance needed to frame it based on your render settings and camera specs. It’s perfect for motion designers who want pixel-perfect compositions without fiddling with coordinates.
🧠 How It Works (In Plain English)
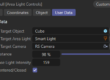
- Link a Rectangle Spline to your camera via User Data.
- The script checks your render resolution and calculates the aspect ratio.
- It reads your camera’s focal length and sensor width.
- Using this data, it computes the vertical field of view (FOV).
- Then it figures out how far the camera needs to be to frame the rectangle vertically.
- Finally, it positions the camera in front of the spline, matching its orientation and updating the focus distance.
🛠️ How to Use It
- Add a Python Tag to your camera.
- Create a Rectangle Spline in your scene.
- Add a User Data Link field to the camera and link the spline.
- Paste the script into the Python Tag.
- Hit play or refresh the scene—your camera will snap into place.
📸 Why It’s Useful
- Consistent framing across different resolutions.
- Automated setup for product shots, UI mockups, or stylized layouts.
- No manual math—just link and go.
💡 Pro Tips
- Works best with orthographic or telephoto-style setups.
- You can swap the Rectangle Spline for other shapes by modifying the type check.
- Great for template-based workflows or procedural animation rigs.
Python
import c4d
import math
def main():
cam = op.GetObject()
if not cam:
print("❌ No camera found (Python tag has no object).")
return
# User Data Link: Frame Spline
spline = cam[c4d.ID_USERDATA, 1] # Adjust ID if needed
print("---- CAMERA FRAME ALIGNMENT START ----")
print("Linked Spline:", spline)
if not spline:
print("❌ No spline linked in User Data.")
return
# Check correct type
if not spline.CheckType(c4d.Osplinerectangle):
print(f"❌ Linked object is not a Rectangle spline! TypeID: {spline.GetType()}")
return
else:
print("✅ Rectangle spline detected.")
# Get render data
doc = c4d.documents.GetActiveDocument()
rd = doc.GetActiveRenderData()
res_x = float(rd[c4d.RDATA_XRES]) or 1920.0
res_y = float(rd[c4d.RDATA_YRES]) or 1080.0
aspect = res_x / res_y
print(f"Render Resolution: {res_x} x {res_y} (Aspect: {aspect:.4f})")
# Get camera data
cam_data = cam.GetDataInstance()
focal_length = cam_data.GetFloat(c4d.CAMERA_FOCUS)
sensor_width = cam_data.GetFloat(c4d.CAMERAOBJECT_APERTURE)
print(f"Camera Focal Length: {focal_length} mm")
print(f"Camera Sensor Width: {sensor_width} mm")
if focal_length <= 0 or sensor_width <= 0:
print("❌ Invalid focal length or sensor width.")
return
# Get rectangle dimensions
rect_width = spline[c4d.PRIM_RECTANGLE_WIDTH]
rect_height = spline[c4d.PRIM_RECTANGLE_HEIGHT]
print(f"Rectangle Size: {rect_width:.3f} x {rect_height:.3f}")
# Derive sensor height from aspect ratio
sensor_height = sensor_width / aspect
print(f"Sensor Height: {sensor_height:.4f} mm")
# Compute vertical field of view
fov_v = 2.0 * math.atan((sensor_height * 0.5) / focal_length)
print(f"Vertical FOV: {math.degrees(fov_v):.4f}°")
# Calculate required distance to frame the rectangle perfectly
# Using the height since that's what determines the vertical FOV
required_distance = (rect_height * 0.5) / math.tan(fov_v * 0.5)
print(f"Required Camera Distance: {required_distance:.3f} units")
# Get spline's world transformation
spline_mg = spline.GetMg()
spline_pos = spline_mg.off
spline_forward = spline_mg.v3 # Z-axis (forward direction)
# Position camera in front of the rectangle
cam_pos = spline_pos - spline_forward * required_distance
# Create camera matrix (same orientation as spline, but at calculated distance)
cam_mg = c4d.Matrix(cam_pos, spline_mg.v1, spline_mg.v2, spline_mg.v3)
# Apply transformation to camera
cam.SetMg(cam_mg)
# Optionally update focus distance to match
cam[c4d.CAMERAOBJECT_TARGETDISTANCE] = required_distance
print(f"✅ Camera positioned {required_distance:.3f} units from rectangle.")
print(f" Camera at: ({cam_pos.x:.2f}, {cam_pos.y:.2f}, {cam_pos.z:.2f})")
print(f" Rectangle at: ({spline_pos.x:.2f}, {spline_pos.y:.2f}, {spline_pos.z:.2f})")
print("---- CAMERA FRAME ALIGNMENT END ----\n")
c4d.EventAdd()